|
 |
Circuits designed by David Johnson,
P.E.
Last Updated on:
Saturday, December 23, 2017 03:21 PM
Master Category List - Dave's Circuits
The contents &
graphics of Discovercircuits.com are copyright protected.
LINKING to Dave's circuits is permitted but DO NOT COPY any files to your WEB
SITE server |
|
|
|
|
More
Motor Controller Circuits |
|
Medium
Power 12v Brush Motor Speed Controller
July 13, 2008 |
In many applications, you would like to hold the speed of a motor constant, even
as variations in the power supply voltage or mechanical load try to change its
speed. In other applications, the average current to the motor needs to be
limited, so the initial in-rush current when starting the motor is not too high.
Also in some applications you would like to allow the motor to be in locked in a
stall condition, without doing harm to the motor or the drive circuit. These
two features can often be combined in a single control circuit. |
|
|
|
There are many ways
you can monitor the speed of a DC motor. Some techniques connect some type of
rotary sensor directly the motor shaft. This method can often lead to a very
accurate speed measurement, since the sensor may produce multiple pulses per shaft
rotation. There are countless optical and magnetic sensors available for this
purpose. When possible, I like dispense with any external sensor and to tap into
the signals produced by the motor itself, to gage the motor speed. Motors with a three
phase brush commutator (three brush rings) will usually produce a very clean back emf
signal. |
|
This is the voltage
produced by the motor, if it was coasting at a specific speed, without any applied
drive. Knowing the relationship between the back emf voltage and the shaft
speed, you can design a circuit to maintain any constant motor speed by monitoring the
back emf voltage. But, few motors use a three phase commutator. Most DC brush
motors you will encounter will be single phase type. Often these DC motors will
produce clean current pulses, each time the brush commutator changes the polarity of
the DC applied to the motor windings. Using a small resistance in series with the
motor drive circuit, you can extract these pulses to measure the motor speed.
|
|
For many inexpensive
motors, which are often used in toys and some consumer appliances, neither the back
emf method nor the brush current pulse methods will work. The signals are just
too noisy to be practical. With these motors, only an external shaft sensor will
work. You will have to conduct some experiments on the particular motor you want
to control, to determine the best speed monitoring method. |
|
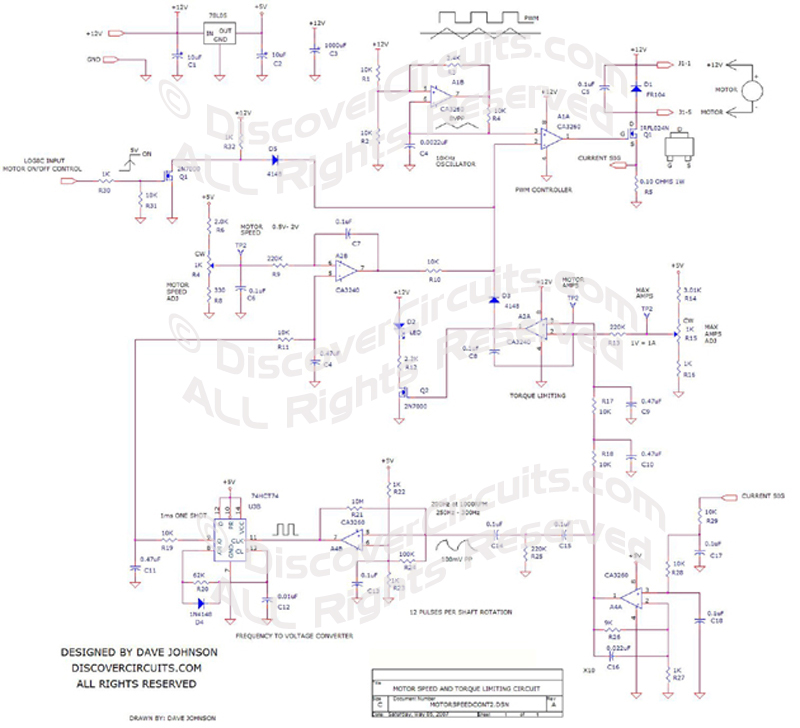
The circuit below is a
speed control for a medium power 12v DC operated single phase brush motor. It uses the
brush current pulse method to monitor the motor speed. It includes a method to
limit the average motor current. I have also included a means to turn on and off
the motor from a simple TTL logic signal. |
|
The circuit uses some
rather old op Amp ICs I had laying around. Other op Amps and voltage comparators could
also be used. The circuit uses a pulse width modulation (PWM) scheme to control
both the motor speed and the maximum average current. The current control is
handy when you want to limit the motor torque, since motor current and torque are
directly related. |
|
The circuit uses the
current pulses from the motor brushes to extract the motor speed. For the motor I
used, there were exactly 12 pulses per shaft rotation. The typical average motor
current was about 1.2 Amps with a speed of about 1000RPM. At 1000 RPM, the pulse
frequency works out to be 200Hz. |
A 10KHz ramp generating oscillator
is used as the timing generator for the PWM circuit. An op Amp compares the ramp
voltage with the control voltage from either the current limiting circuit or the speed
control circuit. When in current limit, the speed control part of the circuit is
pushed out of the way. A multi-pole low pass filter, removes the brush current
pulses from the motor, which appear across a small 0.1 ohm resistor. The pulses
are Amplified by a factor of X10 using A4. The signal from the pulse Amplifier
is then routed to a comparator circuit, which generates a square wave type signal.
That signal is then connected to a one-shot circuit, which uses one half of a dual
D-flip/flop IC. The output of the one shot is then filtered, to produce a
voltage, proportional to the pulse frequency. An op Amp then compares the speed
signal to an adjustable reference signal. The output of the speed error Amp,
then is connected to the PWM circuit, to maintain a constant motor speed. |
|
In a second circuit, the average DC
current is monitored using the DC voltage across the 0.1 ohm shunt resistor. It
too has an adjustable reference, so the limiting current (torque) can be controlled.
A diode isolates the two control circuits from the PWM circuit. A second diode
routes +5v to the PWM control input, when the on/off input logic control signal is
low. This pushes the PWM output signal low, keeping the motor turned off.
A 5v voltage regulator is used to provide a stable +5v voltage to the speed and torque
reference circuits. |
|
|
Click on Drawing Below to view PDF version of Schematic |
|
 |
|
|
|
|